MSP430 Работа со светодиодом
Эта статья для тех, кто хочет узнать, как работать со светодиодом на микроконтроллерах MSP430
Программное обеспечение «TiTAN_example_01_simply_led_blink» вы можете найти по ссылке https://titan-project.com/en/software/
Этот урок будет посвящен двум средам разработки для микроконтроллеров с ядром MSP430, которое является основой для плат TiTAN. По этой причине этот урок будет разбит на две части.
В первой мы познакомимся с бесплатной средой разработки, основанной на технологии Web и любезно предоставляемой компанией Texas Instruments. Она находится по адресу https://dev.ti.com
TI Cloud Tools

Для работы с ней Вам необходимо создать аккаунт или войти под уже существующим. При первом посещении внимательно следите за подсказками и рекомендациями на странице. Они помогут установить и настроить специальную программу для работы с программатором-отладчиком. После чего переходим в раздел CSS Cloud.
MSP430 Работа со светодиодом. Практика.
Для первого знакомства со средой разработки загрузим проект «TiTAN_example_01_simply_led_blink» на https://titan-project.com/en/software/. Давайте рассмотрим, что в нем происходит.
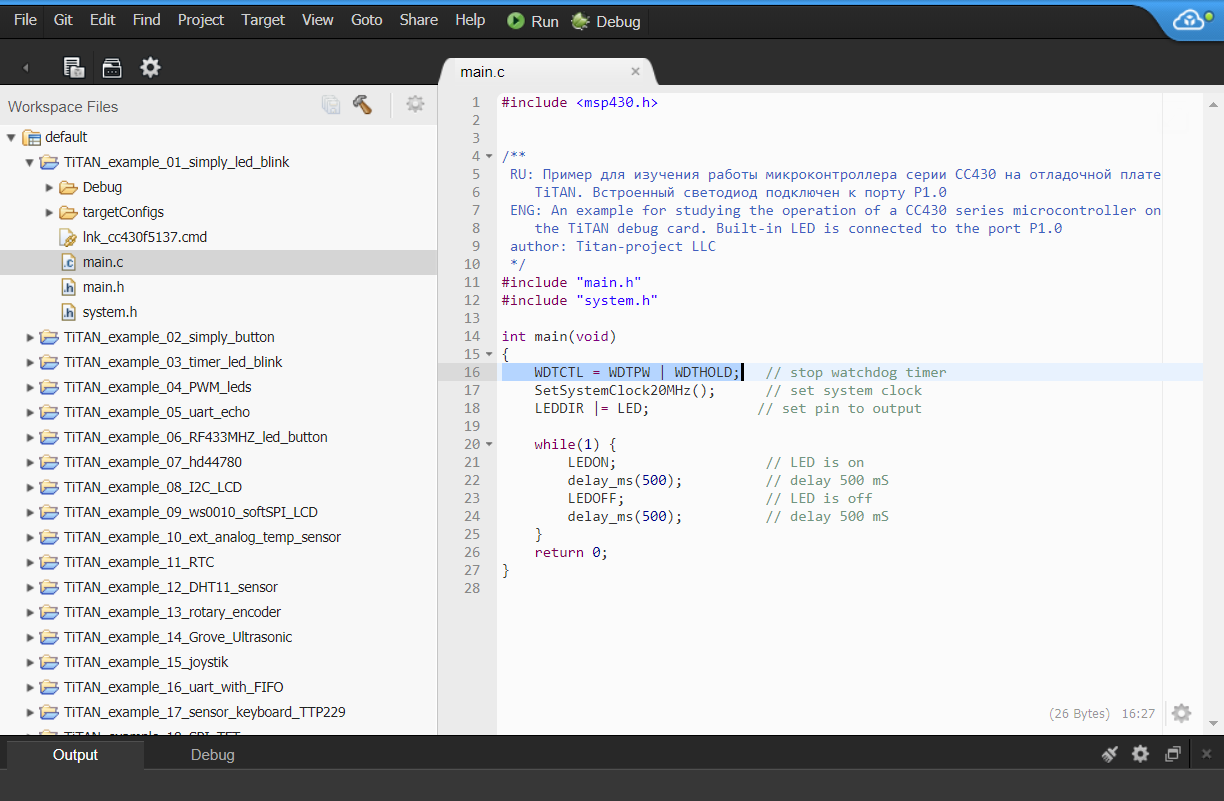
Строка «WDTCTL = WDTPW | WDTHOLD;» отключает таймер Watch Dog. Так, как в ядре MSP430 этот таймер запускается сразу, то с запуском ядра его необходимо отключить, и включать только под контролем. Иначе будете долго искать причины сбоев программы, не догадываясь о том, что вам портит жизнь именно Watch Dog.
Следующая функция «SetSystemClock20MHz();» устанавливает внутренний генератор 20МГц. Эта функция, как и функция «delay_ms();», объявлена в файле «system.h». Вся внутренняя периферия микроконтроллера так же переключается на эту частоту.
По технической информации Texas Instruments 20МГц является предельной частотой микроконтроллера. На самом деле, в некоторых случаях, ядро возможно запустить от внешнего кварцевого резонатора 26МГц подключенного к радиочастотному узлу микроконтроллера.
В будущем мы обязательно расскажем, как устанавливать частоту отдельно ядра и периферии.
Командой «LEDDIR |= LED;» настроим направление работы вывода подключенному к светодиоду. Макросы «LEDDIR», «LED» и другие описаны в файле «main.h» что облегчит работу с TiTAN в дальнейшем.
И наконец в бесконечном цикле происходит поочередное переключение состояния светодиода каждые 500 миллисекунд.
Настало время собрать наш проект.

Если компиляция прошла без ошибок — в строке вывода вы увидите примерно такую картину.

Подключим плату TiTAN к USB и загрузим в него программу, нажав на кнопку «Run».

Процесс загрузки займет совсем немного времени и по окончании программа будет запущена автоматически

Поздравляем, вы успешно освоили первую среду разработки для TiTAN.